Autonomous Loco-Manipulation
Fully autonomous without any human teleoperation.
Real-World Tasks
Close dishwasher
Press button
Open door
Lift basket
Simulation Tasks
Visualized point clouds are transformed from egocentric perspective.
Press button
Pull handle
Push door
Lift basket
Twist valve
Pull object
Shoot ball
Open dishwasher
Close dishwasher
Teleopration
Besides autonomous manipulation, we can also collect data via teleopration.
Method
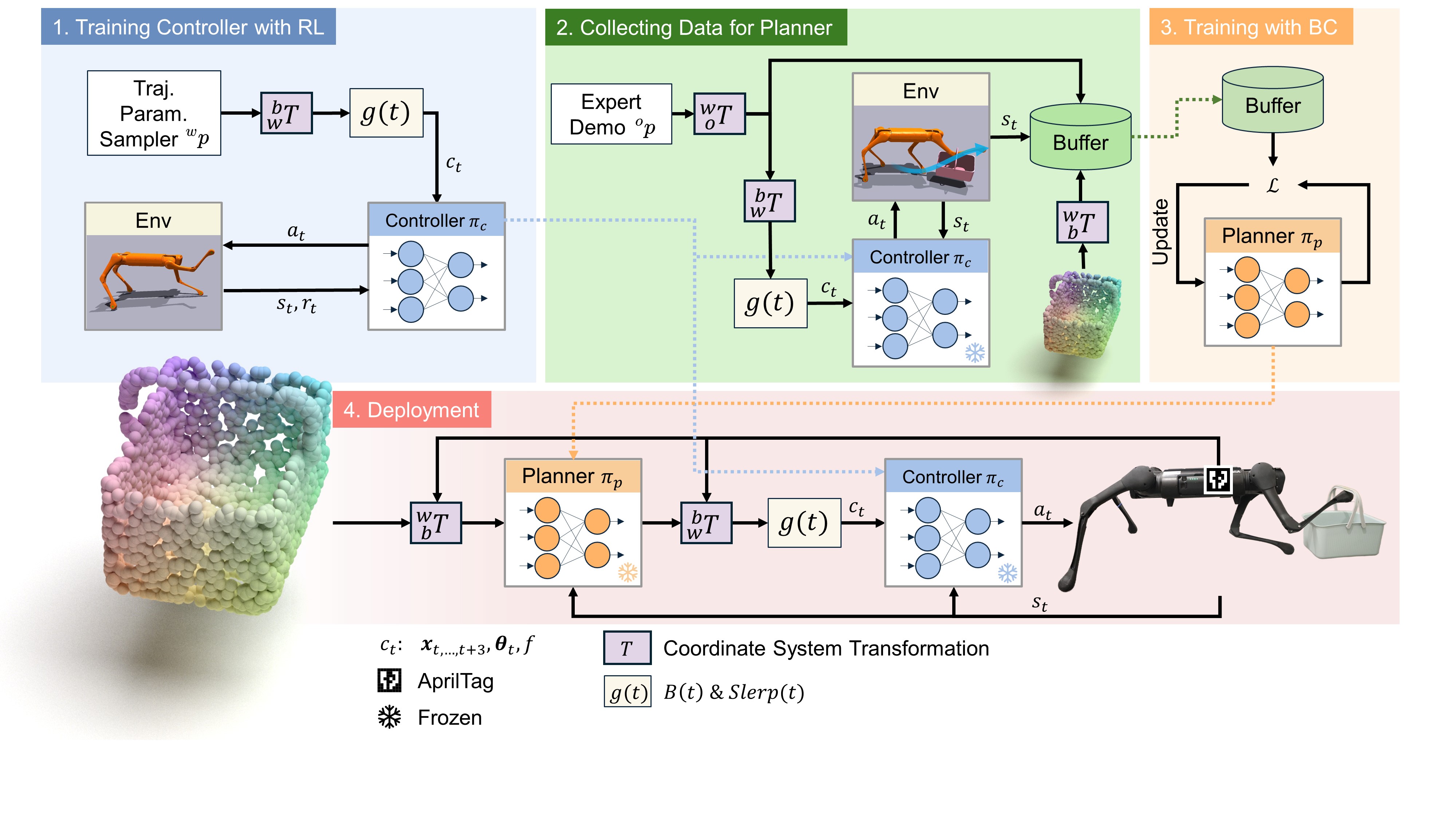
Track Random Curve with Our Low-level Control Policy
The red sphere represents the Bézier control point, the small coordinate axis represents the pose of the target trajectory at that time, and the big coordinate axis represents the pose of the end-effector.
Expert Demonstration Collection
We design manipulation trajectories for different tasks and collect demonstrations rapidly through parallel simulation.
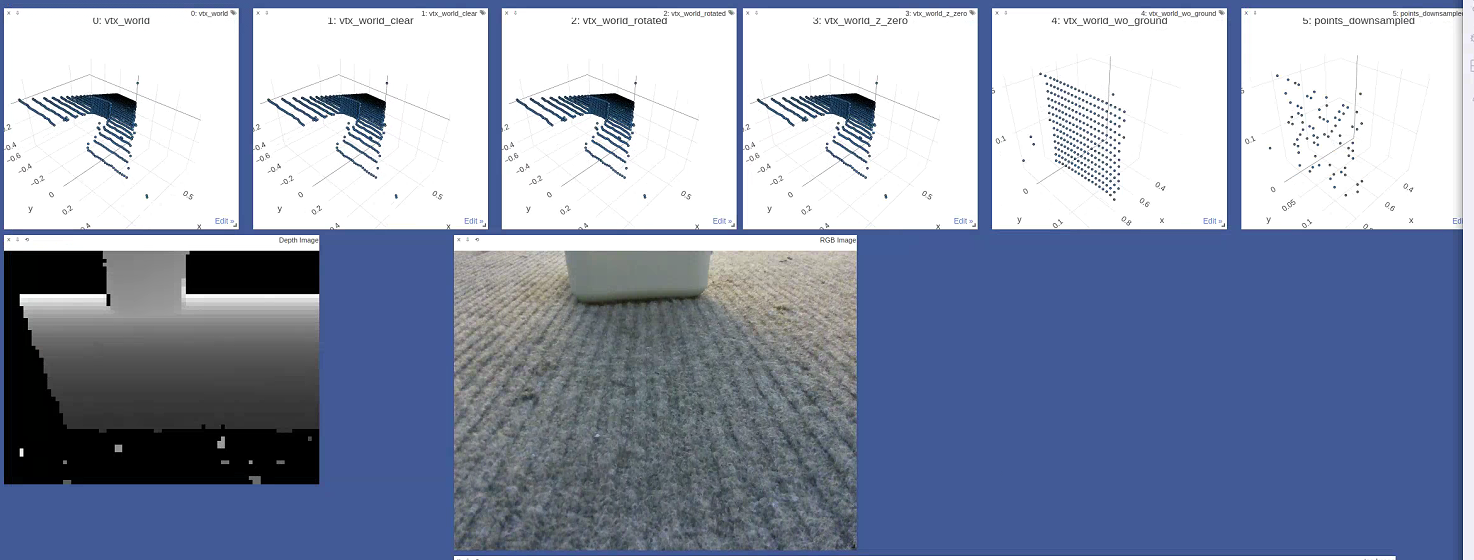
The post-processing process of point clouds in the real world
To address the obvious visual info gap, I performed a series of post-processing on the point cloud of the real-world. These complex steps clearly constrain the potential of the proposed pipeline, which has resulted in me having to migrate only 4 tasks from simulation to reality.
Real-World Basket Task
BibTeX
@inproceedings{he2024learning,
title={Learning Visual Quadrupedal Loco-Manipulation from Demonstrations},
author={Zhengmao He, Kun Lei, Yanjie Ze, Koushil Sreenath, Zhongyu Li, Huazhe Xu},
year={2024},
eprint={2403.20328},
archivePrefix={arXiv},
primaryClass={cs.RO}
}